
8月24日,在腾讯汽车与创新港举办的2017全球汽车AI大会上,原谷歌副总裁、Google X实验室联合创始人、谷歌无人车之父Sebastian Thrun分享了过去十几年来他在自动驾驶领域的经历。
Sebastian Thrun表示,谷歌无人驾驶系统采取深度学习的方式,将驾驶记录的数据输入到计算机里面,通过机器人自我学习或车联网的方式掌握各个交通事故的模型。但除非遇到交通事故,人类驾驶汽车很容易重复犯相同的错误。
原本看似疯狂的新兴技术发展,可能在未来某一天就改变了人们的生活和工作。“12年前,我永远都不会想到无人驾驶会成功,只有书呆子才会觉得无人驾驶会实现,但是作为科研者,我们就是要把不可能变为可能。”Sebastian Thrun表示,“假如自动驾驶真的成为现实的话,大概有10%的工作将会发生改变,比如说卡车司机的工作可能会被代替,不管是几岁小孩或者是百岁老人,都有可能实现自由的驾驶。”
“无论对于AI的存在致以多大的怀疑,在一两年之后,大家都不得不接受机器的学习能力要远远超过人类学习能力这样一个事实。”Sebastian Thrun坚信,2050年自动驾驶会超过人类驾驶行为。同时,随着深度学习概念的诞生和发展,AI技术在包括癌症诊断、远程医疗等领域发挥了重要作用,有了深度学习就会使技术不断向前推进。
以下内容根据Thrun在腾讯汽车全球汽车AI大会上的演讲整理而成:
与自动驾驶结缘
自动驾驶的概念由来已久,Thrun 作为一名较早接触自动驾驶领域的专家,从事相关领域的研究已经超过十年,他在演讲中按照时间轴的顺序讲述了一下自动驾驶发展的历史、目前的情况,以及未来的发展前景。
DARPA Grand Challenge
Thrun 与无人驾驶真正结缘是从2004年开始。13年前,美国政府和美国国防部先进研究项目局举办了一个关于汽车的挑战赛(DARPA Grand Challenge)。这个关于无人驾驶和自动驾驶的挑战赛,目标是让车辆在莫哈韦沙漠中行驶超过140英里。

早期参加DARPA挑战赛的车辆
当时参赛队伍中,很多都是来源于大学的车队。最大的车15吨重,最小的车是一个轮式机器人,来自加州伯克利大学,不过第一年比赛的时候还没有哪辆车能够完成比赛。

斯坦福AI团队
Thrun 看到了未来自动驾驶的,2005年 Thrun 在斯坦福兼职教授的时候,当时主要是教AI(人工智能)相关的专业,于是他在斯坦福大学创建了自己的AI研究团队,目标是让车在道路上行驶。
Thrun 团队的成员基本都是自己的学生,由于起初的资金不够也没有给学生任何工钱,但是 Thrun 会提供给他们更多的课程作为回报。
2005年的时候,斯坦福大学的参赛车Stanley在弯曲道路的路况下,完成了100多英里自动驾驶距离,差不多在沙漠里行驶了6个多小时,也是第一辆完成DARPA Grand Challenge的无人驾驶车。
Google 无人驾驶车初见雏形

不久后,Thrun 团队开始受到谷歌的关注,随后还与大陆集团进行了合作,购买了很多汽车零配件,如摄像头、激光雷达、感应器和传感器等,紧接着Thrun 和团队把这些配件都装到了无人驾驶车上面,也就是谷歌最早期的原型车。
谷歌的无人驾驶车载起步阶段也并不是一帆风顺,由于软件算法和传感器等技术并不是十分成熟,Thrun 团队在加州研发的过程中尝试了不少解决方案。

丰田普锐斯(2010年)

雷克萨斯SUV(2012年)

著名的“豌豆车”
2010年的时候,谷歌采用了一辆丰田普锐斯作为试验车;2012年,这辆车换成了雷克萨斯的SUV;2015年,才是那个我们经常在新闻报道中见到的“豌豆车”,它看起来更小,更有科技感。
无人驾驶车的最大特点是没有司机,因此必须要有一个非常强大的电脑来帮助我们进行所有的运算和执行,这样才可以让人不用待在里面开车。所以 Thrun 团队在这个车上面加了很多的雷达传感器和激光传感器。
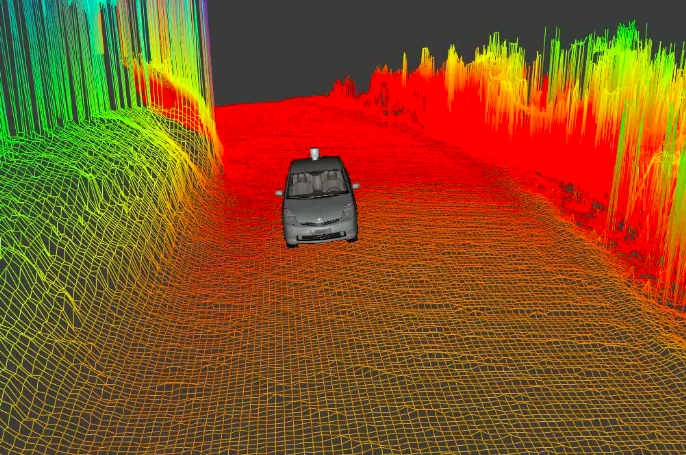
2010年到2011年之间,Thrun 在旧金山做了一个真正的城市环境下的无人驾驶实验。主要应用到的一项技术就是激光技术、雷达技术,它所捕捉到的画面可以让操作背后的人看得非常清楚,就是车的周围有什么样的环境、有什么样的阻碍物。它可以告诉你车周围环境的所有细节。

Thrun 认为机器人拥有大象般的记忆,可以记住所有的东西,所以只要把这些数据都预先存进去,然后收集数据再进行数据的处理和分析之后,机器人可以记住所有的数据,然后可以让整个的行驶变得非常安全。一旦有精确3D的成像,就可以做出非常意想不到的效果。换句话说,可以通过新的技术发现原来没有的解决方案,而且精度更高。
无人车的另一个技术难点就是定位问题,要随时知道车辆的位置。为此,Thrun 带领的谷歌无人车团队也跟美国政府进行了一些合作,利用美国政府的30颗卫星,精确度达到厘米甚至毫米级,可以预测前面即将经过的路段的情形。
通过动态3D的技术呈现车周围的情况也非常关键,比如说区别自行车和行人、检测出物体移动速度。为了实现这一点,Thrun 经过数年开发了项目来追踪不同的行人、不同的汽车、不同的自行车往来穿梭的场景,预测接下来物体移动路径可能的交叉点和人们的移动行为等。
在上述技术的积累下,2013-2014年期间无人驾驶技术成熟度有了一定进步,通过这个方式可以将周边的环境可视化,在测试的过程中主要依靠计算机自主进行判断和决策,人类介入的情况会越来越少,可能50万公里才会介入一次。

在 Thrun 看来,人工智能机器学习和人的学习方式是完全不一样的,人都可能会犯错,犯同样的错误之后才能够吸取经验,但是谷歌的系统不会出现这个问题。
通过驾驶功能的记忆输入到计算机里面,然后计算机进行学习,通过机器的不停学习、车联网的方式使所有其他的人也学习了这样的功能,掌握了交通事故的模型,所以通过AI比人类学习的速度更快。无论你对技术有多大的怀疑,但是一两年之后必须要相信机器的学习能力要远远超过你的学习能力。
2008年的时候,Thrun 刚刚进入到深度学习的研究中,当时他还是一个研究生,但是如今的AI技术已经发生了翻天覆地的变化,并且产生了一些大规模的转换,比如AlphaGo、自动驾驶、远程医疗诊断等技术进步,背后都离不开深度学习技术的推进。
机器学习是非常快的,不要考虑软件问题和其他问题,通过一些计算机的编码可以实现很好的深度学习。比如人和机器驾驶的案例,你教孩子的话不可能告诉他各种各样的意外事故,但是对于计算机而言,你把大的规则输入到计算机,计算机会通过深度学习的方式进行创新性的分析,会使其他的计算机也受益,这样学习速度当然要超过人类。
创办学习平台 Udacity
Thrun 离开Google之后,创办了Udacity学习平台,包括深度学习、自动驾驶,各种各样的题目都可以在Udacity进行学习,为此还推出了一些课程教授学生如何通过学习使Google自动驾驶的方式更为智能。
Thrun 还在Google开发无人车的时候,曾遇到了一位湾区盲人斯蒂夫,由于疾病他失去了视力,开车也就成为了无法实现的愿望,像斯蒂夫这样的残疾诗人还有很多,对于他们而言,自动驾驶能够给他们生活带来巨大改变。
2014年的时候,Thrun和Uber合作了一个共享平台的项目,大家可以通过这个平台和其他人来共享无人驾驶的汽车,只需要登陆APP去预约这个车,车就可以自己开过来。当然你想要开车的话可以自己开车,有这两种模式可以选。这个方面是非常好的例子,未来在共享汽车方面有可能自动驾驶也是非常大的一块市场。
作为总结,Thrun 希望大家可以去思考一下过去的历史,在过去历史的基础上再去思考一下未来。如果自动驾驶真的成为现实的话,差不多有10%的工作将会发生改变,我希望在未来就能够把这种不可能变成可能。
